
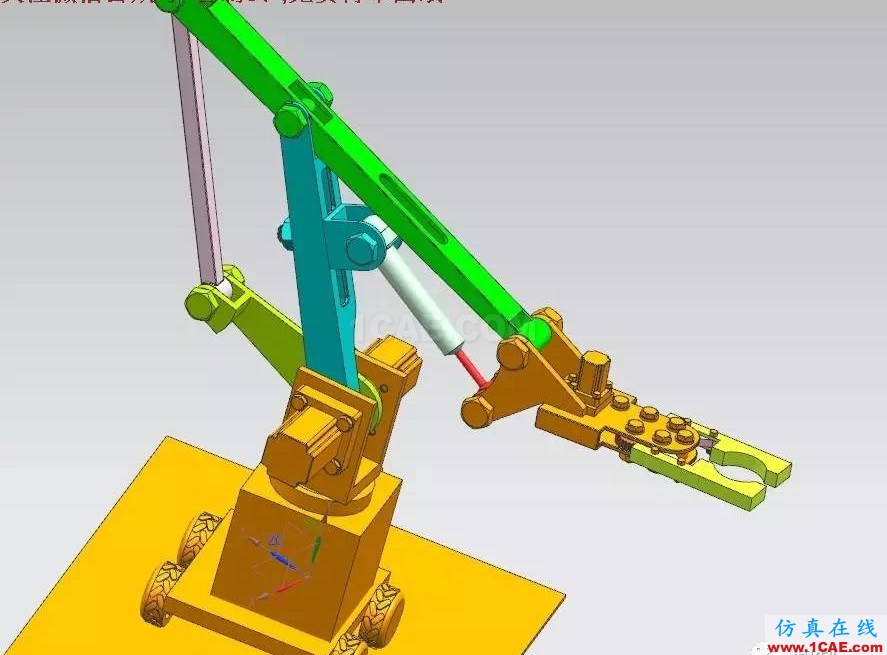
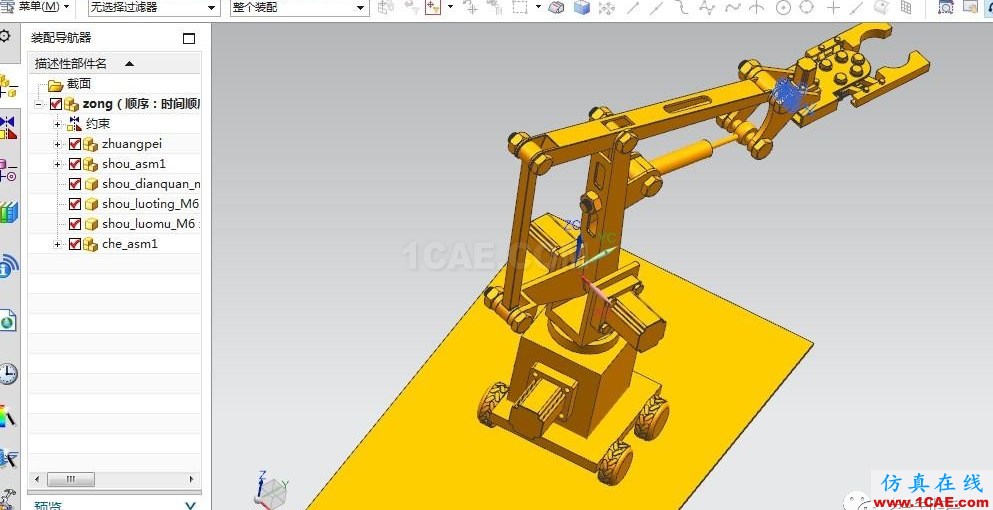
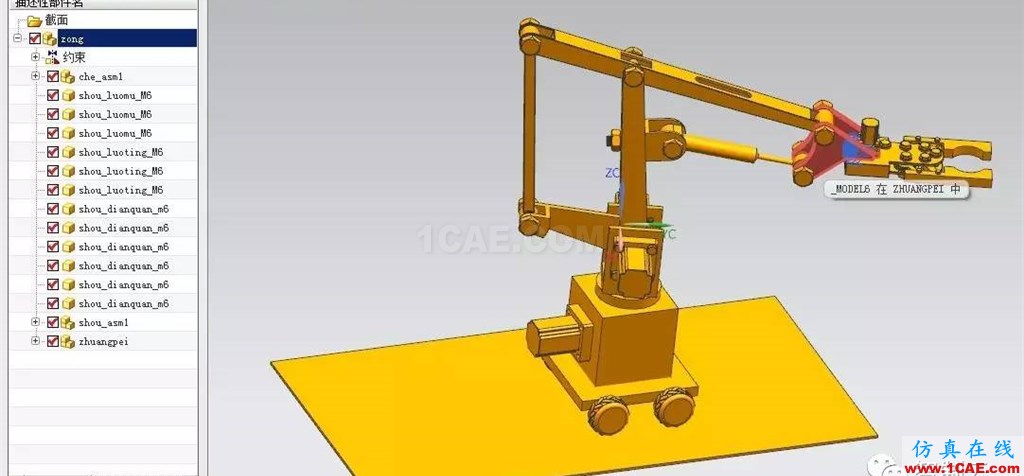
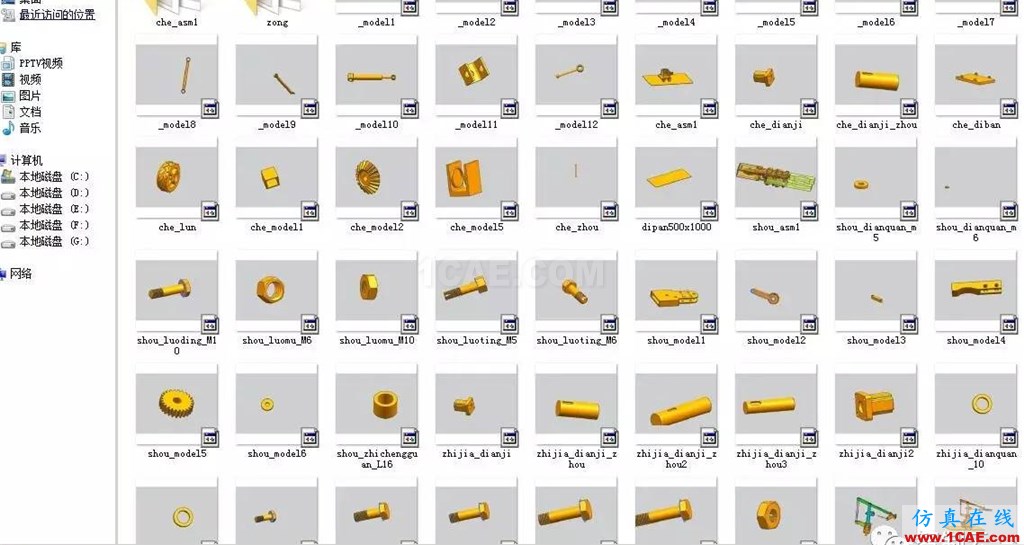
【機器人】多連桿機械手三維建模圖紙(仿真源文件) UG8.5(NX)設計百度網盤下載
2017-01-02 by:CAE仿真在線 來源:互聯網
文件大小:13.7MB
格式:UG8.5設計。
簡介:運動及夾持部分設計較為詳細,采用傘齒輪連桿夾持機構,連桿部分除伺服電機還增加了氣缸輔助驅動。底部移動小車建模簡單,主要用于建立仿真結構。有全套裝配體仿真源文件,可直接進行分析并更改系統參數。


鏈接:http://pan.baidu.com/s/1nuH19eL 密碼:p5p9
或
鏈接:http://pan.baidu.com/s/1pLk3EjD 密碼:4nst
開放分享:優質有限元技術文章,助你自學成才
相關標簽搜索:【機器人】多連桿機械手三維建模圖紙(仿真源文件) UG8.5(NX)設計百度網盤下載 ug nx培訓課程 UG培訓 ug模具培訓 ug視頻教程 ug設計教程 ug軟件下載 UG-autoform-dynaform仿真一體化 ug在模具建筑室內設計工業設計的應用 UG代做 UG基礎知識 Fluent、CFX流體分析 HFSS電磁分析
編輯




