
機構運動的檢驗員——UG NX運動仿真
2016-11-21 by:CAE仿真在線 來源:互聯網
何謂運動仿真模塊
運動仿真模塊屬于計算機輔助工程分析的1個應用軟件,用于建立機構運動學和動力學仿真模型,分析機構運動規律和動力特性。UG NX運動仿真模塊會自動仿真主模型的裝配文件,并建立一系列不同的運動仿真,每個運動仿真都可以獨立修改,而不影響裝配主模型,一旦完成機構優化設計方案,即可直接更新裝配主模型,以反映機構優化設計的結果。

運動驅動
運動驅動是賦給旋轉副、滑動副和柱面副等運動副上控制運動的運動副參數。因此,運動驅動總是與運動副相關。用戶既可以定義一個默認的運動驅動,也可以創建一個僅與指定求解方案中的運動副相關的獨立驅動。對任何運動副,在一個求解方案中只能包含一個獨立驅動。但是,允許對某一特定運動設置多個不同特性的運動驅動,并將其中一個設為正常驅動,再將其他幾個驅動作為替代驅動加到不同的求解方案中,然后分別求解比較結果。UG NX 的運動驅動共有如下6種類型。

(1)無
“無”驅動即沒有外加的運動賦在運動副上。在1個機構中除了連接原動件(如曲柄)的運動副應該施加后面介紹的某種運動驅動外,其余的運動副都應該選擇“無”驅動。
(2)常數(以前版本翻譯為“恒定”)
“常數”運動驅動設運動副為恒定運動(旋轉或平移)。這類運動驅動要設置需要的初始位移或初始速度或初始加速度。一般設定初始速度為大于零的某個常數。
(3)簡諧
“簡諧”運動驅動生成一個光滑的向前或向后的正弦運動。這類運動驅動需要設置的運動參數為振幅、頻率、相位角和位移。
(4)功能(以前版本翻譯為“函數”或“運動函數”)
“功能”運動驅動是用位移或速度或加速度的某種函數關系式驅動的,可以用于定義由開環或閉環系統控制的動力學求解方案這是一種復雜運動驅動。
(5)鉸鏈運動驅動(以前版本翻譯為“關節運動驅動”)
鉸鏈運動驅動要在“運動副”對話框中設置。鉸鏈運動驅動就是設某一個運動副以特定的步長和特定的步數運動,所需要的輸入參數為步長和步數。
(6)電動機驅動(以前版本翻譯為“馬達驅動”)
如前所述,只有當用戶在“環境”對話框中選擇了“動力學”和“電動機驅動”復選框時,才會在“驅動”對話框中添加“電動機驅動”類型(注意,在“運動副”對話框中并不添加),電動機驅動需要分配一個電動機和信號圖驅動運動副。

UG NX運動仿真的分類及說明
UG NX運動仿真模塊將運動副類型分為常規運動副、基本運動副,以及約束與連接副三大類型。其中常規運動副有旋轉副、滑動副、萬向節、恒速副、固定副、球面副、柱面副、平面副和螺旋副等;基本運動副有在點上、在線上、在面上、方位、平行和正交等;約束與連接副有點在線上約束、線在線上約束、點在面上約束、線纜副、齒輪副和齒輪/齒條副等。
常規運動副

基本運動副
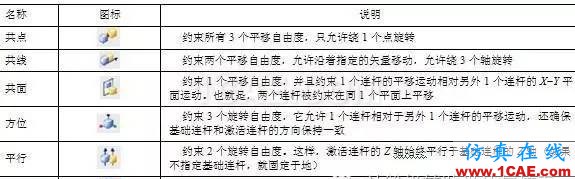
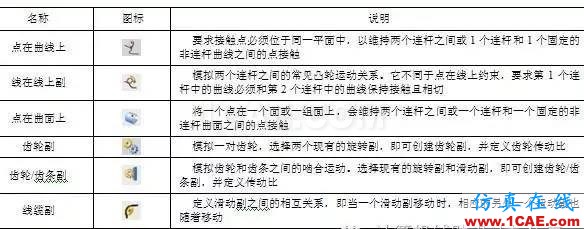
約束副
下面讓我們看一下對于同一個機構的不同運動方式吧
是不是感覺機械的世界很神奇?
相關標簽搜索:機構運動的檢驗員——UG NX運動仿真 ug nx培訓課程 UG培訓 ug模具培訓 ug視頻教程 ug設計教程 ug軟件下載 UG-autoform-dynaform仿真一體化 ug在模具建筑室內設計工業設計的應用 UG代做 UG基礎知識 Fluent、CFX流體分析 HFSS電磁分析




