
SolidWorks/COSMOSMotion的凸輪輪廓曲線設計
2013-06-08 by:廣州有限元分析、培訓中心-1CAE.COM 來源:仿真在線
在凸輪機構工程應用中經常要求頂桿件在若干個位王要有精確值,針對這種情況本文利用SolidWorks繪制凸輪機構實體零件、構建機構裝配體模型,用COSMOS Motion自帶樣條函數自動實現離散點值擬合,模擬運行凸輪機構,生成凸輪輪廓曲線,并對凸輪輪廓曲線進行后處理,最終得到實體凸輪模型。
作者: 陳忠維 來源: 萬方數據
關鍵字: 凸輪機構 離散 仿真 COSMOS Motion SolidWorks
SolidWorks是當今造型、仿真方面最為流行的三維CAD軟件,它具有基于特征進行參數化造型設計特點,模型各個特征的幾何形狀與尺寸大小用變量參數來表達,變量參數不僅可以是常數,也可以是某種代數式。如果定義某個特征的變量參數發生了改變,則模型的這個特征的幾何形狀或尺寸大小將隨著參數的改變而改變,通過控制各種參數,即可以達到控制模型幾何形體的目的。COSMOSMotion是SolidWorks自帶的插件,和SolidWorks無縫對接,直接使用SolidWorks的數據庫,對系統的運動學、動力學和靜力學進行分析和仿真…。對于頂桿運動形式可用連續函數表達的凸輪輪廓曲線設計,可通過用SolidWorks構造基本的模型,在COSMOS Motion中輸入凸輪和頂桿的運動約束函數表達式,然后模擬凸輪機構的運行狀況,最終設計得到凸輪輪廓曲線。
但在實際應用中,對頂桿的約束往往不能用函數來表示,只明確了幾個位置的精確要求,其他位置沒有精確的數值要求,把這種情況的凸輪輪廓曲線設計簡稱為離散點凸輪輪廓曲線設計。離散點凸輪輪廓曲線設計可通過用多項式等函數擬合各離散點,得到約束函數后再用前述的辦法來設計。本文將具體研究利用COSMOS Motion自帶樣條函數自動實現離散點值擬合,模擬運行凸輪機構,生成凸輪輪廓曲線,并對凸輪輪廓曲線進行后處理,最終得到實體凸輪模型。
1在SolidWorks中建立凸輪機構裝配關系
在SolidWorks裝配體界面建立如圖1所示的裝配關系,使凸輪的水平中心線和頂桿中心線重合,為構建準確的裝配關系,精確定位凸輪和頂桿的接觸點,頂桿的頭部可設計成三角形。
2設置約束和運動參數
2.1添加約束
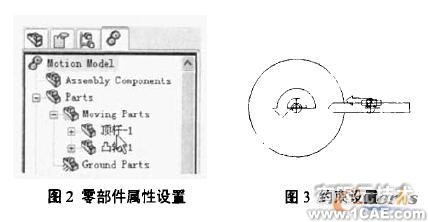
在COSMOSMotion中構建運動模型時,不要按默認推薦情況設置約束和固定零件,應在部件屬性設置欄把凸輪和頂桿都設為運動零件,如2圖所示。在約束欄對裝配體中的凸輪和頂桿分別添加旋轉副和移動副約束,如圖3所示。
2.2設置運動參數
凸輪為勻速轉動;如表1所示頂桿往返運動的位移和時間關系不是函數關系,而是離散值。如引言所述,離散點凸輪輪廓曲線設計可通過用多項式等函數擬合各離散點,得到約束函數后再用函數式來驅動,但這樣比較復雜,且會產生些累積誤差。針對此類問題,COSMOS Motion可直接輸入離散值,通過自帶樣條函數自動實現曲線擬合。如圖4所示,在函數項選樣條式,并在時間欄和位移欄分別按表1值手動輸入,或用載入事先完成的txt或CSV格式的文件。

3仿真參數設置
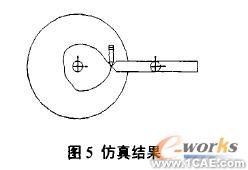
模型仿真運動時,各部件必須剛好完成1個周期的運動,由表l所示頂桿1個循環的時間為4秒,因此要把仿真模擬時間設置為4秒,并把凸輪的轉動速度改為90deg/sec,這樣凸輪運行4秒后也剛好是1個循環;在結果分析項設置要求輸出頂桿頂點對運動軌跡,即凸輪輪廓曲線。仿真運行后得如圖5所示結果。

4凸輪輪廓曲線后處理
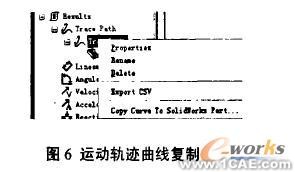
仿真后得到的凸輪輪廓曲線在SolidWorks中不是實體輪廓曲線,不能直接構建實體零件模型,要在SolidWorks中構建凸輪實體零件模型,可如圖6所示選復制運動軌跡曲線到SolidWorks選項,把仿真后得到的凸輪輪廓曲線插入到繪制SolidWorks零件模型界面,如圖7所示。然后選擇前視基準面為草圖平面構建實體零件模型,選【轉換實體曲線】按鈕將運動軌跡曲線轉換為實體輪廓曲線,在繪制凸輪軸孔等后,選[拉伸凸臺/基體]按鈕就可得到三維凸輪實體模型,如圖8所示。
5結束語
在凸輪機構頂桿件只明確若干個位置的精確值情況下,也用SolidWorks及COSMOS Motion設計凸輪輪廓曲線,并能把在生成的凸輪輪廓曲線輸入到SolidWorks,在此基礎上創建三維凸輪實體模型。
相關標簽搜索:SolidWorks/COSMOSMotion的凸輪輪廓曲線設計 Fluent、CFX流體分析 HFSS電磁分析 Ansys培訓 Abaqus培訓 Autoform培訓 有限元培訓 Solidworks培訓 UG模具培訓 PROE培訓 運動仿真




