
UG NX5的漸開線標準齒廓嚙合仿真
2013-05-18 by:廣州有限元分析、培訓中心-1CAE.COM 來源:仿真在線
戴春祥 徐國俊 來源:e-works
關鍵字:漸開線標準齒廓 參數化設計 嚙合傳動 運動仿真
在UG NX5環境下對通過參數化設計獲得的漸開線標準直齒圓柱齒輪齒廓模型進行嚙合裝配,然后建立運動仿真模型,包括設置桿件、運動副及解算參數等,最后通過創建嚙合線以及齒輪模型的嚙合傳動仿真分析,驗證所建立的幾何模型和運動模型的正確性及參數相關性。
1、前言
齒輪傳動是最重要的機械傳動形式之一,它可用于傳遞空間任意兩軸之間的運動和動力,是現代機械中應用最廣泛的一種傳動機構,其特點是傳動效率高、結構緊湊、工作可靠、壽命長等。齒輪機構常用的齒廓曲線有漸開線、圓弧曲線、擺線等,而在目前工程實際中,漸開線齒廓是最常用的一種齒廓曲線。
在一般的齒輪嚙合仿真分析中,常常存在兩個問題:一是沒有通過正確的嚙合裝配就對齒輪副進行嚙合仿真分析;二是在分析中沒有利用漸開線標準齒輪的嚙合線進行正確傳動的驗證分析。本文在UG NX5環境下對通過參數化設計獲得的漸開線標準直齒圓柱齒輪齒廓模型,進行參數化嚙合裝配,然后建立運動仿真模型,包括設置桿件、運動副及解算參數等,最后通過創建嚙合線以及齒輪模型的嚙合傳動仿真分析,驗證所建立的幾何模型和運動模型的正確性及參數相關性。
2、漸開線標準齒廓的嚙合裝配
通過UG NX5的參數化設計可以獲得漸開線標準直齒圓柱齒輪齒廓模型。由機械原理課程可知,兩個漸開線齒輪正確嚙合的條件是它們的模數和壓力角分別相等,而對于標準漸開線齒輪,國標規定壓力角為20°,因此只要模數相等即可。
假設已經生成兩個模數相同(m=4)齒數不同(Z1=25,Z2=35)的標準直齒圓柱齒輪模型,通過UG NX5的裝配模塊可將它們精確地嚙合裝配在一起。
為了確定齒輪的嚙合位置,首先在齒輪模型中創建一個帶鍵槽的中心孔,其中小齒輪的鍵槽方位由齒廓鏡像線確定,大齒輪的鍵槽方位由齒槽鏡像線確定,其草圖位置及約束情況如圖1所示。以下闡述兩個齒輪模型的嚙合裝配方法。
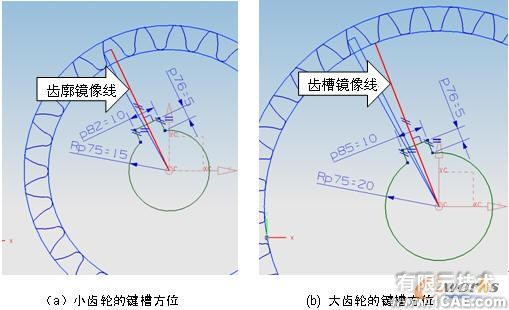
圖1 創建帶鍵槽的中心孔及其約束
通過裝配模板新建一個裝配文件。按裝配約束先裝配小齒輪模型(注意不是按絕對位置裝配),層選項為原始層(Original),這樣可保持主模型里層的設置不變。裝配約束關系為:
--小齒輪模型空間里的基準Z軸與裝配空間里的基準Z軸對齊;
--小齒輪模型空間里的齒廓鏡像線與裝配空間里的基準Y軸對齊,此裝配約束的目的是讓鍵槽處在垂直位置。
裝配結果如圖2所示,此時小齒輪模型在裝配空間里是完全約束的。
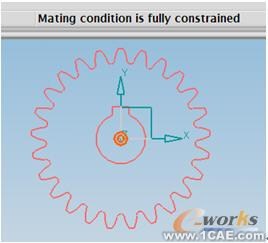
圖2 小齒輪模型的裝配結果
裝配大齒輪模型的裝配設置同上。其裝配約束關系為:
--大齒輪模型空間里的節圓圓弧與小齒輪模型空間里的節圓圓弧相切;
--大齒輪模型空間里的XY基準平面與裝配空間里的XY基準平面對齊;
--大齒輪模型空間里的齒槽鏡像線與裝配空間里的基準Y軸對齊。
裝配結果如圖3所示,此時大齒輪模型在裝配空間里也是完全約束的。其中圖3(a)所示為顯示出了裝配約束所需的節圓圓弧和齒廓、齒槽的鏡像線,圖3(b)所示為僅顯示齒輪齒廓截面模型,圖3(c)所示為兩個齒輪齒廓裝配后嚙合處的放大視圖。
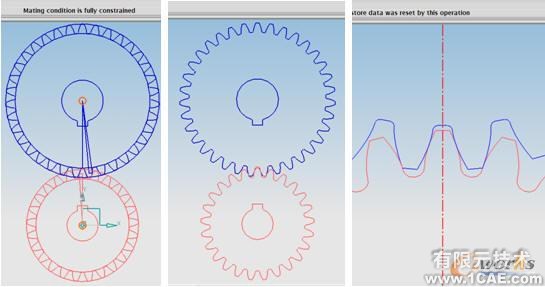
圖3 兩個齒輪模型的裝配結果
至此,兩個齒輪模型的嚙合裝配已經完成。
3、漸開線標準齒廓的嚙合傳動仿真
在UG NX5環境下建立一個運動學(Kinematics)仿真分析模型,如圖4(a)所示。建立步驟如下:
--建立桿件(Link):分別選擇兩個齒輪的截面模型(齒廓和鍵槽孔)作為桿件;
--建立旋轉運動副(Revolute):分別在兩個齒輪截面模型的中心建立旋轉運動副,并對大齒輪模型施加一個常數運動驅動(假設大齒輪為主動輪),其初始速度為(-30degree/second),負值表示齒輪運動與圖示驅動符號相反;
--建立齒輪運動副(Gear):分別選擇大齒輪和小齒輪的轉動副,并輸入傳動比(Ratio)為1.4(傳動比由齒數比確定:Z2/Z1=35/25=1.4)。
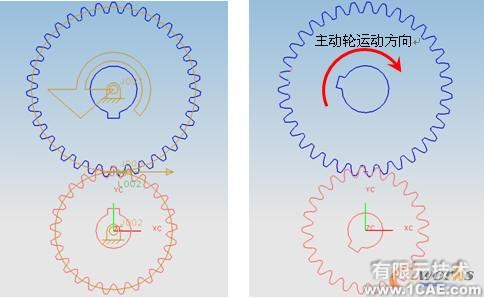
圖4 建立并解算運動仿真模型
在建立運動仿真模型后,即可對其進行解算。解算參數設置如下:
--解算類型:選擇常態運行(Normal Run);
--分析類型:選擇運動學;
--時長(Time):由于主動輪的初始速度為30(度/秒),為了使主動輪能夠旋轉一周,選擇時長為12(秒),即12秒×30度/秒 =360度;
--步數(Step):在速度和時長確定后,步數決定該時段內運動的快慢,為了詳細觀察齒廓嚙合過程,選擇步數為3600。
解算后即可對齒輪嚙合傳動進行運動仿真顯示,如圖4(b)所示為其中一幅運動截圖。
為了說明標準漸開線齒廓的嚙合過程,在齒輪裝配模型里創建以下輔助線(如圖5所示):
--通過WAVE Geometry Linker的方法分別拷貝兩個齒輪的基圓和齒頂圓;
--作直線,分別與兩個齒輪的基圓內切,該直線![]() 即為兩個齒輪的理論嚙合線;
即為兩個齒輪的理論嚙合線;
--分別過理論嚙合線與兩個齒輪齒頂圓的交點作直線,該直線![]() 即為兩個齒輪的實際嚙合線。
即為兩個齒輪的實際嚙合線。
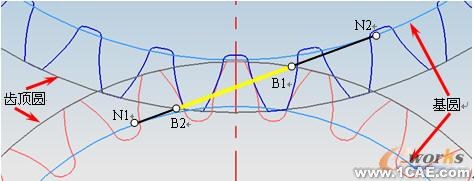
圖5 標準漸開線齒輪嚙合中的嚙合線
在創建理論嚙合線和實際嚙合線后,繼續對齒輪嚙合傳動進行運動仿真顯示,就可以非常直觀地看到兩個齒輪在嚙合線的B1點進入嚙合(如圖6(a)所示),在嚙合線的B2點退出嚙合(如圖6(b)所示),所以稱![]() 為實際嚙合線。
為實際嚙合線。
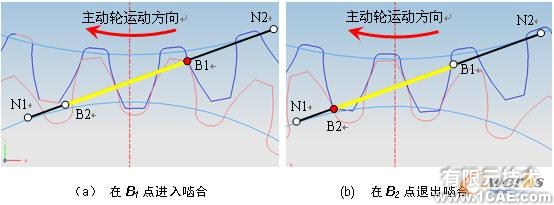
圖6 觀察兩個齒輪的實際嚙合過程
如果修改齒輪參數,例如將兩個齒輪的齒數分別改為Z1=28,Z2=36,同樣也可以進行嚙合傳動分析(注意此時的傳動比為Z2/Z1=36/28),其分析結果與圖6所示的結果相似。由此可以證明以上漸開線標準直齒圓柱齒輪齒廓的嚙合裝配是參數化相關的,同時也驗證了漸開線標準齒輪齒廓模型及其運動模型的正確性。
4、結論
通過嚙合裝配獲得了兩個漸開線標準直齒圓柱齒輪齒廓的裝配模型,通過嚙合傳動獲得了兩個漸開線標準直齒圓柱齒輪齒廓的運動仿真模型,運動分析結果表明,本文論述的漸開線標準直齒圓柱齒輪齒廓的嚙合裝配是參數化相關的,漸開線標準齒輪齒廓模型及其運動模型均是正確的。
相關標簽搜索:UG NX5的漸開線標準齒廓嚙合仿真 AutoCAD培訓 AutoCAD培訓課程 AutoCAD圖紙設計 AutoCAD在線視頻 AutoCAD技術學習教程 AutoCAD軟件教程 AutoCAD資料下載 Fluent、CFX流體分析 HFSS電磁分析 Ansys培訓 Abaqus培訓 Autoform培訓




